.svg)


3Dモデルを扱う人なら誰でも、ポイント・オブ・ポイント・データの使用から恩恵を受けることができ、ベストプラクティスを理解することで、さらに上を目指すことができる。
詳細で正確な3Dモデルは、同じエリアまたは同じオブジェクトの複数のスキャンに基づいており、それらは「アセンブリ」と呼ばれるプロセスで位置合わせされなければならない。アセンブリは、様々な品質のソリューションと同様に、問題を提起しているプロセスです。この記事では、ポイントクラウドの作成で問われるいくつかの問題の概要を紹介し、特定の永続的な問題に対する最近の解決策を提案します。
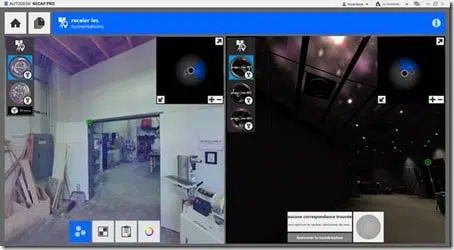
現状」点の雲 スキャナーはオンライン照準を行っている。詳細な3Dモデルを作成するには、一般的に数回のスキャンが必要です。これらのスキャンは、エリアの完全な画像を作成するために組み立てられなければならない。スキャンの組み立ては、ポイントクラウドを作成する上で大きな問題となる。
場合によっては、GPSのようなGNSS(Global Navigation Satellite System)技術をスキャナーの位置データを使用してアラインスキャンに使用することができます。しかし、狭い都市部や森林地帯など、GPSを記録できない状況もあります。
このような場合、コンピュータ・ソフトウェアが点群データを解析し、スキャンを組み立てるための共通形状を見つけることができる。ターゲットを使用する方法と、ソフトウェアのみを使用する方法である。
ターゲットは、点群ソフトウェアが認識しやすいように、点状にした人工物である。各スキャンペアに対して少なくとも3つのターゲットを配置する必要がある。ターゲットの位置は計画され、その後、ターゲットは手動で引き上げられる環境に配置されなければならない。環境が異なれば、ターゲットの配置には様々な障害があり、多くの時間と有資格者の動員を必要とする。

ターゲットのないアセンブリ ターゲットのないスキャンをアセンブリするために、デジタル環境に存在するジオメトリが使用されます。これにより、現場での作業時間を短縮できますが、オフィスでの作業時間はほとんど増えません。
ターゲットのないアセンブリ・ソフトウェアを使用する場合、多くのスキャンを処理するために多くの時間を必要とする。3Dレーザーステートメントプロジェクトでは、人工的なターゲットを特定するために、類似点を探して点の点を調べるために、ソフトウェアでより多くの時間がかかる。データ量が多いため、処理に時間がかかり、各スキャンのペアを回転、垂直、水平の3つのアライメントに従って評価する必要がある。
また、オペレーターが各アセンブリーを押さえたり、手作業でチェックすることも必要です。なぜなら、たった1回のスキャンで歪みや不正確さがプロジェクト全体の精度に影響を及ぼす可能性があるからです。手作業が必要になるということは、それだけ作業時間が増えるということです。
従来のターゲットなしのアセンブリーでは、特定のアセンブリーを確保するために最大60%のオーバーラップが必要であったため、ターゲットなしのアセンブリーでは、ターゲットありのアセンブリーよりも多くのスキャンが必要であった。
点の集合を作成する人は誰でも、ターゲットの有無にかかわらず、謎に直面します。で ATIS.cloud そしてCydis、私達にアセンブリ問題がありません。PX-80は、Slamテクノロジーにより、生成したポイントのポイントを自動的に組み立てます。モバイルレーザースキャナーの結果を十分に活用するには、調査時間の4倍に相当するスラム計算フェーズを実施する必要があります。したがって、4,000 m² の建物の場合、それを上げるのに 15 分、つまり 1 時間のスラム計算が必要です。したがって、建物の点群は、記載されている1時間15分以内に利用可能になります。転送に数分追加します。 ATIS.cloud Webプラットフォームと点群は、許可されたすべての人がアクセスできます。