.svg)


任何使用三维模型的人都可以从点数据的使用中获益,而对最佳实践的理解可以让我们走得更远。
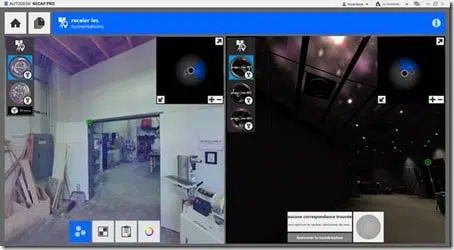
详细而精确的三维模型是基于对同一区域或同一物体的多次扫描,这些扫描必须对齐--这一过程被称为 "装配"。装配是一个会产生问题的过程,同时也是一个质量参差不齐的解决方案。本文概述了创建点云过程中的一些问题,并提出了解决某些顽固问题的最新方案。
现状 "点云 扫描仪执行在线目标。详细 3D 模型所需的覆盖范围通常需要多次扫描。必须将这些扫描集合起来,才能创建该区域的完整图像。将扫描数据相互组合是创建点云的主要问题。
在某些情况下,GNSS(全球导航卫星系统)技术(如 GPS)可用于使用扫描仪的位置数据进行对齐扫描。但在一定数量的情况下,无法记录 GPS,例如在区域内部、狭窄的城市环境或森林中。
在这种情况下,计算机软件能够对点云数据进行分析,以找到共同的几何形状,并在此基础上对扫描结果进行组装。目前已经使用了两种组装方法,一种是使用目标,另一种则完全基于软件的使用。
目标是被简化为点的人造物体,易于点云软件识别,以便组装。每对扫描至少要放置三个目标。必须对目标的位置进行规划,然后手动将目标放置在要升高的环境中。不同的环境在放置目标时会遇到各种各样的障碍,这就需要花费大量的时间和调动合格的人员。

无目标装配 为了装配无目标扫描,需要使用数字环境中的几何图形。这可以节省地面作业的时间,但几乎不会增加办公室的工作时间。
使用无目标装配软件需要大量时间来处理大量扫描。在三维激光报表项目中,软件需要花费更多的时间来检查各点,寻找相似点以识别人工目标。由于涉及的数据量相当大,因此需要更长的处理时间,而且每对扫描必须根据三种排列方式进行评估:旋转排列、垂直排列和水平排列。
标准的装配软件没有目标,操作员也要抓取并手动检查每个装配,因为单个扫描的变形或误差会影响整个项目的精度。需要人工干预意味着工作量更大,时间更长。
传统的无目标装配需要高达 60% 的重叠才能确保特定的装配,这意味着无目标装配比有目标装配需要更多的扫描。
任何创建点集的人都面临着有或没有目标的谜团,因为两者都需要大量的时间和工作。在 ATIS.cloud 和 Cydis,我们没有组装问题。由于其 Slam 技术,PX-80 会自动组装它生成的点。为了能够充分利用移动激光扫描仪的结果,您必须进行相当于测量时间 4 倍的猛击计算阶段。因此,对于 4,000 平方米的建筑物,需要 15 分钟才能升起它,即 1 小时的大满贯计算。因此,建筑点云将在 1 小时 15 分钟内可用。添加几分钟将其传输到 ATIS.cloud 所有授权人员都可以访问 Web 平台和您的点云。